Test La sûreté de fonctionnement d’un système est la propriété qui permet à ses utilisateurs…
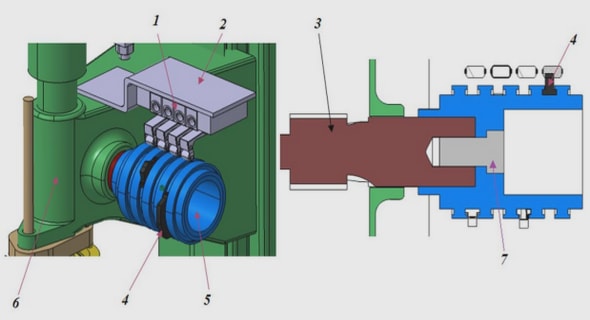
pfe automatisme
Test La sûreté de fonctionnement d’un système est la propriété qui permet à ses utilisateurs…
Contexte énergétique Dans un contexte énergétique difficile, marqué par l’épuisement prévisible des énergies fossiles et…
Influence du couplage sur la perception haptique des phénomènes micro et nanophysiques Le couplage le…
Télécharger le fichier pdf d’un mémoire de fin d’études Le Paléoindien ou « Lithic Age» (4500…
Télécharger le fichier pdf d’un mémoire de fin d’études Les particularités de la communication publique territoriale…
Télécharger le fichier pdf d’un mémoire de fin d’études Qu’est ce qui peut mener une personne…
Télécharger le fichier pdf d’un mémoire de fin d’études Les enjeux relevés par les coworking spaces…
Vieillissement des populations Tendance à l’échelle nationale Selon les récentes projections de l’INSEE, la France…
Aperçu des MRS Cette section présente un aperçu des MRS en mettant en avant leurs…
Evolution des architectures logicielles La prolifération et la complexification des systèmes d’information poussent les…
Contexte et motivation Les logiciels et les systèmes informatiques en général croissent en nombre et…
Les robots parallèles Définition : un robot parallèle est un mécanisme en chaîne cinématique fermée, constitué…
Architecture des systèmes embarqués Un système embarqué comporte une partie matérielle formée d’un ensemble d’éléments…
Systèmes de surveillance dans un processus de supervision La surveillance est la base d’une excellente sûreté…
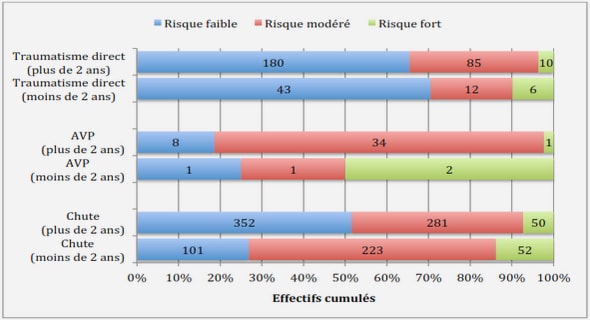
La PME-PMI et les risques professionnels Les critères de définition d’une PME, selon les textes…
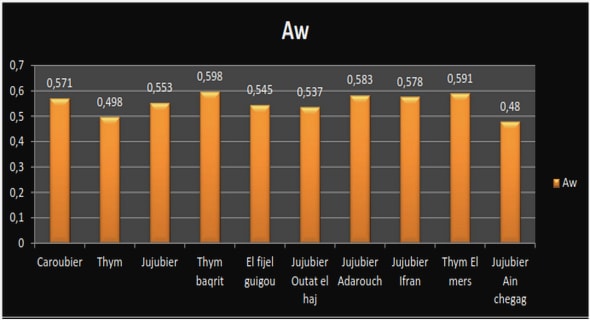
Caractérisation des eaux côtières La gestion intégrée de l’espace côtier est par défmition une mission…
Evolution des attentes des conducteurs Depuis plusieurs années, deux phénomènes tendent à faire évoluer le…
Multi-Robot Systems Classification Given the variety of designs of multi-robot systems, it is useful to…
Le système nerveux Le système nerveux remplit trois fonctions principales . Il y a la…
D’une voie classique à une voie mini-invasive Les interventions chirurgicales servent en général à réparer…
Définition du système Un véhicule automobile est un ensemble de sous systèmes dynamiques faisant intervenir…
Les degrés de liberté nécessaires aux applications de pick-and-place Nous définissons les degrés de liberté…
Conversion de l’énergie cinétique du vent Les pales de l’éolienne balaient le champ des vitesses…
Identification basée sur l’analyse de sensibilité La procédure d’identification développée ici est basée sur l’analyse…
Modèle de Karnopp Ce modèle a été proposé par Dean Karnopp [14]. Il a été…
Calcul des mouvements excitants Les mouvements des robots industriels peuvent être définis par des mouvements…
Sonar latéral L’utilisation de véhicules autonomes sous-marins pour l’acquisition d’images acoustiques par sonar latéral (Lexique)…
Banc de filtres, ondelettes et lifting scheme 2-D Les signaux bi-dimensionnels que nous considérons sont…
Les tâches génériques Les premières recherches sur la coopération multi-agents portaient sur l’étude du milieu…
La route intelligente L’automobile qui se déplace dans son infrastructure constitue un système complexe et…
