Télécharger le fichier pdf d’un mémoire de fin d’études
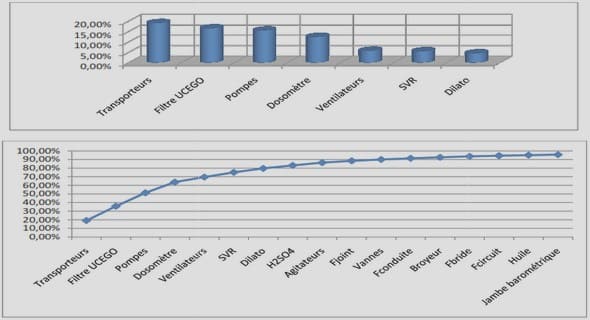
Vie d’un cahier des charges
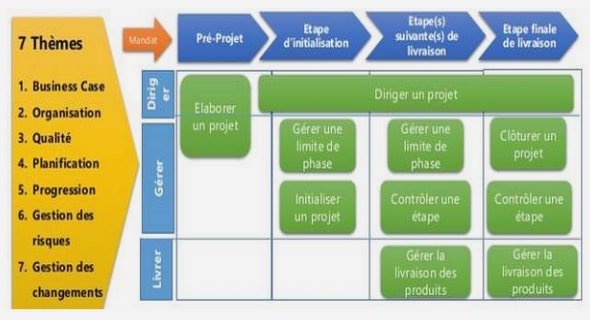
Les étapes d’un problème de commande
On désigne par :
|
Table des matières
Chapitre 0 Introduction
Motivations
Contexte et problématique
Organisation du manuscrit
Chapitre 1 Formalisme d’un cahier des charges générique pour un problème de commande
1.1. La théorie de la contre-réaction
1.2. Vie d’un cahier des charges
1.3. Les étapes d’un problème de commande
1.4. Le problème fondamental de la commande
1.5. Les spécifications d’un cahier des charges
1.5.1. La stabilité
1.5.1.1. Stabilité entrée/sortie (stabilité externe)
1.5.1.2. Stabilité externe des systèmes linéaires
1.5.1.3. La stabilité au sens de Lyapunov (stabilité interne)
1.5.1.4. La passivité
1.5.1.5. Stabilité interne des systèmes linéaires continus invariants
1.5.1.6. Critères de stabilité des systèmes linéaires
1.5.2. Les spécifications en performances
1.5.2.1. Suivi de trajectoire de référence (consigne)
1.5.2.2. Rejet/atténuation de signaux de perturbation.
1.5.2.3. Atténuation des bruits de mesure.
1.5.2.4. Commande modérée
1.5.2.5. Dépendance des spécifications et limite de performances
1.5.2.6. Performances des systèmes linéaires multivariables
1.5.3. Les spécifications en robustesse
1.5.3.1. La robustesse en stabilité
1.5.3.2. La robustesse en performance :
1.5.4. Les spécifications de la loi de commande
1.6. Classification des méthodes de synthèse
1.6.1. Méthodes de synthèse synthétiques
1.6.2. Méthodes de synthèse analytiques
1.6.3. Méthodes de synthèse par optimisation
1.6.3.1. Classification (convexité et dimension du problème)
1.7. Vers une approche d’optimisation non linéaire
1.8. Conclusion
Chapitre 2 Formulation et analyse de cahier des charges par optimisation
2.1. Concepts fondamentaux pour une approche générique
2.2. Cahiers des charges et critères mathématiques
2.3. Traduction du cahier des charges
2.3.1. Expression des contraintes temporelles E/S du système
2.3.1.1. Formulation directe des spécifications temporelles
2.3.1.2. Formulation des spécifications temporelles sous forme de gabarits
2.3.2. Faisabilité des cahiers des charges temporels
2.3.2.1. Etude de la faisabilité des spécifications temporelles par une approche E/S
2.3.2.2. Etude de la faisabilité des spécifications temporelles par une approche paramétrique générale2-20
2.3.3. Expression des contraintes fréquentielles du système
2.3.3.1. Formulation des spécifications fréquentielles à base d’indicateurs de robustesse
2.3.3.2. Formulation des spécifications fréquentielles sous forme de gabarits
2.3.3.3. Formulation des spécifications fréquentielles modales
2.3.4. Faisabilité des cahiers des charges fréquentiels
2.3.4.2. Etude de la faisabilité des spécifications fréquentielles par une approche paramétrique
2.4. Bilan et approche paramétrique générale pour l’analyse de cahiers des charges
2.4.1. Formulation du problème d’optimisation global de l’approche paramétrique générale
2.4.2. Transformation en un problème d’optimisation non linéaire sans contraintes
2.5. Sensibilité des critères et contraintes d’une approche paramétrique générale
2.6. Conclusions
Chapitre 3 Techniques d’optimisation non linéaire
3.1. Contexte du travail
3.2. Principes généraux
3.2.1. Problème d’optimisation
3.2.2. Conditions d’optimalité
3.2.2.1. Conditions d’optimalité en l’absence de contraintes
3.2.2.2. Conditions d’optimalité en optimisation avec contraintes
3.3. Prise en compte des contraintes par pénalisation
3.3.1. Types de pénalisations
3.3.1.1. Pénalisations extérieures
3.3.1.2. Pénalisations intérieures
3.3.1.3. Pénalisations exactes
3.4. Méthodes globales versus méthodes locales
3.5. Méthodes d’optimisation sans contraintes
3.5.1. Les méthodes stochastiques
3.5.1.1. Métaheuristiques
3.5.1.2. Principe
3.5.1.3. Classification
3.5.1.4. Exemples de métaheuristiques
3.5.2. Les méthodes de descente
3.5.2.1. Calcul de la direction de descente
3.5.2.2. Calcul de la longueur de descente (recherche linéaire)
3.5.3. Les méthodes mixtes
3.5.4. Les méthodes de recherche directe
3.5.4.1. Méthodes de recherches par motifs généralisés
3.5.4.2. Directions conjuguées (algorithme de Powell)
3.6. Conclusions
Chapitre 4 Algorithmes d’optimisation développés
4.1. Algorithme du simplexe modifiée
4.1.1. Algorithme de Nelder-Mead (Simplexe)
4.1.2. Détection et traitement des dégénérescences
4.1.3. Prise en compte des bornes
4.1.3.1. Prise en compte des bornes par projection
4.1.3.2. Prise en compte des bornes par reparamétrisation
4.2. Méthodes du sous-différentiel
4.2.1. Généralisation du gradient
4.2.1.1. Définitions
4.2.1.2. Propriétés
4.2.1.3. Stationnarité
4.2.2. Méthodes de descente non différentiables
4.2.3. Le sous-différentiel de Clarke est ses propriétés
4.2.4. Algorithme du epsilon-sous-différentiel (AESD)
4.2.4.1. Notations
4.2.4.2. AESD
4.2.5. Algorithme du epsilon-sous-différentiel modifié (AESDM)
4.2.5.1. Notations
4.2.5.2. AESDM
4.2.6. Algorithme de gradient Universel
4.2.6.1. Notations
4.2.6.2. AGU
4.3. Évaluation et comparaison des algorithmes développés
4.3.2. Résolution des problèmes test sans contraintes d’encadrement
4.3.2.1. Paramètres des algorithmes
4.3.2.2. Analyse des résultats numériques
4.3.3. Résolution des problèmes test avec contraintes d’encadrement
4.3.3.1. Paramètres des algorithmes
4.3.3.2. Analyse des résultats numériques
4.4. Conclusions
Chapitre 5 Analyse du ε-sous différentiel et calcul du gradient
5.1. Estimation du ε-sous-différentiel de Clarke
5.1.1. Échantillonnage uniforme dans une hyperboule
5.1.2. Choix du nombre d’échantillons m
5.1.3. Détection de zones non différentiables et ouverture d’un ε -sous-différentiel
5.2. Calcul et estimation du gradient
5.2.1. Différences finies
5.2.2. Méthodes de fonctions de sensibilité
5.2.2.1. Sensibilités des systèmes non linéaires
5.2.2.2. Sensibilités des systèmes linéaires
5.2.2.3. Sensibilité paramétrique fréquentielle
5.2.3. État adjoint
5.2.4. Différentiation automatique et code adjoint
5.2.4.1. Mode direct
5.2.4.2. Mode inverse
5.2.4.3. Principes de différentiation automatique par code adjoint
5.2.5. Dérivation complexe
5.2.5.1. Principe de la méthode
5.2.5.2. Approximation des dérivées d’ordre supérieur
5.2.5.3. Procédure d’implémentation (fonctions complexes de base et opérateurs en Matlab)
5.3. Conclusion
Chapitre 6 Analyse et validation de cahiers des charges pour des problèmes de commande
6.1. Problèmes de stabilisation linéaire
6.1.1. Problème de stabilisation pure
6.1.2. Optimisation de l’abscisse spectrale
6.1.3. Problème de stabilisation simultanée (Application au problème de chocolat belge)
6.2. Synthèse H∞ à structure fixe
6.2.1. Problème de synthèse H∞
6.2.2. Problème de stabilisation robuste (optimisation du rayon de stabilité complexe)
6.3. Asservissement PID d’un moteur à courant continu
6.3.1. Présentation du système
6.3.2. Cahier des charges
6.3.3. Formulation du problème
6.3.4. Résolution, simulation et validation expérimentale
6.3.5. Minimisation du temps de réponse
6.3.6. Modification de la structure PID
6.4. Stabilisation robuste d’un système oscillatoire
6.4.1. Présentation du problème
6.4.2. Cahier des charges
6.4.3. Formulation en un problème d’optimisation
6.5. Commande Backstepping d’une suspension magnétique
6.5.1. Modélisation du système
6.5.2. Cahier des charges
6.5.3. Synthèse de la commande Backstepping en vue d’une validation expérimentale
6.5.4. Synthèse de la commande Backstepping
6.5.5. Synthèse de la commande Backstepping par retour de sortie
6.5.6. Synthèse d’une commande Backstepping à action intégrale par retour de sortie
6.5.7. Commande Backstepping par retour de sortie adaptative
6.5.8. Prise en compte de la dynamique de l’actionneur
6.6. Commande d’un système de forage pétrolier
6.7.1. Objectifs de la commande
6.7.2. Modèle du missile
6.7.3. Cahier des charges
6.7.4. Commande du missile par un correcteur PI
6.7.5. Commande linéarisante par retour d’état dynamique
6.8. Conclusion
Chapitre 7 Conclusions et perspectives
Apports scientifiques et originalité du travail
Perspectives
Chapitre 8 Annexes
8.1. Annexe 1 : Commande et observateur par Backstepping
8.2. Annexe 2 : Commande d’une suspension magnétique
8.3. Annexe 3 : Commande d’un système de forage pétrolier
Références Bibliographiques.
Télécharger le rapport complet